The Dome


Leading The article with, not one, but THREE synth-porn photos?
Guilty as charged!… The Dome is the straight-up glamor girl in the cast. So it’s fair to suspect her of just getting by on her looks alone.
So…..You may fairly ask: Why a dome? if it was not just because it looks cool.
Here’s why. The dome uses beams of infrared as controllers, and the optimal shape for shining multiple beams outward WITHOUT the potential for them to cross , and thus interfere with one another is a sphere. But I do build these things on a budget so I had to settle for a hemi-sphere…
… and it looked cool.
The dome is another of the instruments that does not fit neatly into my arbitrary categories of ‘electronium’ or ‘modular’. It requires patching to function and in fact it is not really a complete ‘voice in itself. The dome is 60% ‘back-end’* processors, and 40% controllers. There is only ONE dedicated signal source on-board, a single, simple VCO, which I added as an afterthought in order to allow the possibility of doing a demonstration of the Dome without requiring outboard oscillators. The Dome is intended as part of a system of two separate devices; to be used in tandem with one, or the other, of a pair of 5 output outboard complex oscillator devices, namely: ‘Pandora’s Box‘ or “The Bell Jar” which are covered in articles of their own. The complex oscillator outputs enter the Dome through a repurposed RJ-45 patch cable. I used the RJ-45 standard because it was compact, and a fairly quiet multi-conductor over short lengths, and of course, because I had dozens of them laying around unused.
The dome’s feature list is long:
-a dual-beam, medium range infrared gate/CV controller (right hand)
-a triple-beam, high resolution, close range infrared controller with position-hold feature (left hand)
-a voltage controlled 5-channel multiplexer
-a multi-pole VCF
-a 2-pole, state-variable VCF with voltage controlled resonance
-a 3-channel resonator with 3 independent voltage controlled sweeps
-a voltage controlled wave-folder
-2 independent effects processors
-2 voltage controlled SPDT switches
-4 serge-style dual slope generators with built-in VCAs
-2 random step generators
-a smooth random generator
-a triggered ramp generator
-3 mixers
-a pulse & triangle-wave VCO
I have a panel layout map for the Dome and I considered cleaning it up and including it here. But I decided that a two dimensional map of a 3D hemisphere would create more confusion than it dispelled. In my panel map I used geographical terms like ‘north-pole’, ‘equator’ & ‘northernmost’ which do little to illustrate a flat photo.

The infrared (IR) controllers are the principal reason I decided on a hemispheric shape for this device, and my vision of this device was to have a gestural controller that could output a very large number of diverse control vectors. I wanted fast and detailed response to individual, freely moving fingers with no haptic resistance. I considered several schemes including radio waves like a theremin, but that did not offer the resolution I wanted. I work with photocells a lot and tried visible light schemes that worked very well but those schemes are way too susceptible to interference from ambient light, especially on a stage. So I decided to use infrared which is much less prone to such interference.
Robotics is a field in electronics that makes extensive use of sensors and control voltages just like electronic instruments do. I keep up with robotics for the cross-fertilization. So I bought a set of off-the-shelf infrared sensors and built a prototype. They didn’t work. That is to say they worked very well – for robotics- . But they were designed to track objects by flashing pulses at a very fast rate and reading how many of these pulses were reflected back and their relative ‘brightness’. The problem with this scheme is that each of those flashes imposes a current-burst; a ‘tick’ on the power supply. And that tick affects every circuit that shares that power supply; namely everything else in the dome. When I used the robotics sensors the sound outputs on the dome buzzed with sensors nearly as loud as the musical signals. That kind of noise is negligible in making a Roomba, but it plays hell with musical timbre.
Back to the drawing board.
What I finally settled on was making my own sensors that shined continuously. The downside of this approach is that pulsed infrared transmitters like the commercial sensors use less current, so I had to supply a LOT of current to my DIY sensors to sustain their shine. And high current creates heat. That’s why there’s a 1-inch gap around the whole ‘equatorial’ rim and a hole in the top that acts as a ‘chimney’. It does tend to run warm – but it’s dead quiet.
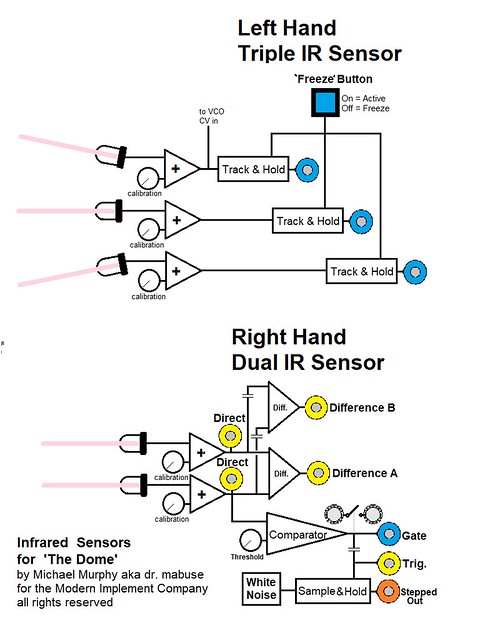
On the left hand I angled 3 IR sensors to align with the first 3 fingers of my left hand. Which gives me 3 independent control voltages and I added a button near the thumb of my RIGHT hand that will freeze all 3 of the control voltages when I push it, and hold them until I press it again.
On the right hand I placed 2 sensors about a finger’s-width apart. I derive a simple gate & trigger from a variable threshold distance along with the standard direct distance control voltage from each sensor. Then I added circuitry (‘difference A’) that amplifies the DIFFERENCES between 2 voltages to get a complex response to just rocking a finger back & forth. I also added another difference amplfier (‘difference B’) that is AC-coupled which will respond only to CHANGES/movement in the IR beams view, so that if I hold still, the difference B control voltage returns to zero volts no matter how close my finger is to the sensor.
It was a bit of a development struggle but in the end, the IR sensors worked as well as I’d hoped and the rest of the build was more fun and improvisational; thinking up circuits to control with those IR controllers and shoe-horning them into every nook and cranny.
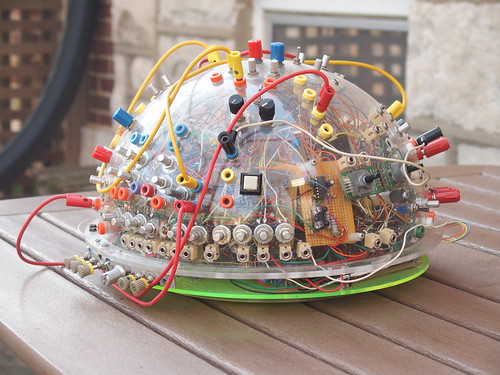
To my delight the whole shebang fit very securely in a snare-drum stand I’d inherited from a percussionist friend. (as seen in the 2nd photo above)
In performance the dome is much less dramatic than the Viaggio . This was by design. The IR sensors are very sensitive to tiny movements at close range. When I play the dome it’s hard to see that I’m moving my fingers at all. I think I look like a creepy old Victorian phrenologist doing an examination on a robot.
* the term ‘back-end’ processor refers to the processing modules at the end of the classic analog monosynth voice; ie: the VCFs, VCAs & Mixers
Comments are closed.